PID控制将输入进行了变化(经过了比例积分微分变化),那他的输出值不是已经和原来的相差了吗?
涉及到自动调节系统,可以说自动调节系统涉及到生活的方方面面 , 看似平淡无奇,却又非常重要 。此问题从我们自身说起,更加便于理解,先来谈一波何为自动调节系统?
人从呱呱坠地起,渐渐地从感性适应了自动调节系统 。例如,一件物品从来没见过 , 第一次去拿起来很有可能就是失败 。第二次去拿可能就是拿起来,这就是调节了手臂力量 。这件物品把它加工一下变轻,表面看起来很重此时去拿,可能会打打到脸,这就是按照原来的条件判断导致手臂力量输出过大而造成被打到脸了 。我们人就是在不断的接受新鲜事物,不断的记忆事物的真相,从而再次遇到我们大脑就能发出正确的指令而做好某件事 。自动调节系统中的核心技术即PID控制技术,属于最为简单的闭环控制技术之一 。通常是利用单反馈或多反馈去实现对控制对象的调节 , 目的就是实现被控对象的可控性和可预知性控制,使得设备运行起来更加可靠、即合理又平稳 。
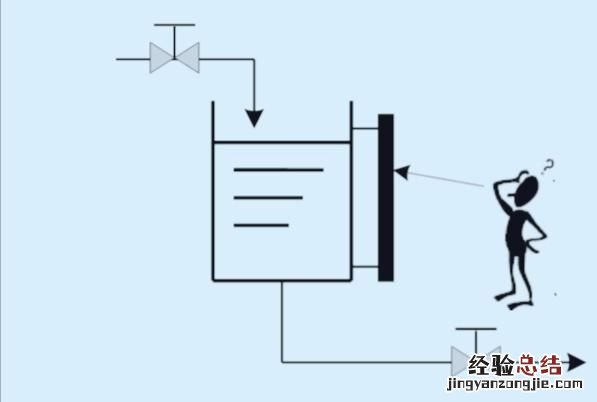
假如,小亮要去做个无聊的事,恰好有个水桶漏水,可是水桶的水要一直保持在某个位置,若发现水位低于理想水位 , 那么就要往水桶加水,来保持水桶水位始终处于想要的位置 。要用这个小故事来说几个性能指标,采样周期、比例系数、积分时间、微分时间 。
【PID控制将输入进行了变化经过了比例积分微分变化,那他的输出值不是已经和原来的相差了吗】
要小亮在水桶旁守着,水位低则加水那么多无聊 。于是他跑到房间里玩,过10分钟来看一次,一看发现水都漏完了 , 则责怪自己太贪玩了 。于是缩短在房间待的时间,于是4分钟一次,来看的时候水位还没下降到目标位置,于是又感觉自己跑的太勤奋了,此时又打算在房间待6分钟,来看的时候刚好水位快下降到目标水位了,于是确定6分钟来一次好的很 。于是在专业方面把这个6分钟称之为采样周期 。刚开始小亮用瓢加水 , 心想浪费时间,于是搞着一个大桶加水,一不小心就溢流了 。发现用桶加水太快了,又想用脸盆加水,此时加水速度变慢相比于瓢加水速度还是快些,但也没有溢流,符合自己想要的,于是改为用脸盆加水了 。从瓢加水到大桶再到脸盆,就是在不断调节比例大小 。小亮确实很懒,此时把舀水的工具确定了,有确定了多久去看一次水桶的水位,他还不满足 。因为此时水不会过量溢流 , 到还是有溢流的危险吧!于是想到打酒用的漏斗它底部有个口子 , 于是把它装在水桶上,脸盆加水往漏斗里倒,水桶溢流基本上不可能了,但是加水速度又降低了,有还出现漏的比加的多,咋办?因此,小亮想改变漏斗口径来解决问题,最终找到合适的漏斗口径从而控制了加水速度 。这里把漏斗漏水的时间称之为积分时间 。人总有不满足心 , 此时又在发挥懒人思想,于是看到一旦水位降低 , 加水不能立刻就满足要求而到达要求水位 。小亮突发奇想 , 把水桶旁放盆水,这盆水不往漏斗加而是直接加在水桶的 。一旦发先水位降低,就即可用脸盆加水 。如此看来,水位加水的及时性得到保证,但是有时手抖一下加多了如何是好?没有办法,只有在高出水面上部分开孔用管子防水 , 用备用桶子接住即可 。这样的话,从管子流出来的水快慢为积分时间 。
综上所述,从小亮的懒人思想可看出 。比例控制其实就是加强控制作用,相当于我看到一块石头,要用多大的力才能搬动 , 过小搬不动过大费力 。积分控制的作用就是消除余差,比例控制调节好了但是达到动态平衡时,发现新平衡的值与目标值还是有差距,这个积分时间必须要设置好,否则设置过大过过小都会偏离目标值 。积分时间设置好后,但是又发现水位低于目标值,加水不及时有一定的延时 , 此时只能用微分控制作用进行超前控制 。因此,P、I、D一起用就是PID控制、P、I一起用就是PI控制、P、D一起用就是PD控制 。这个在工程应用中具体如何应用呢?
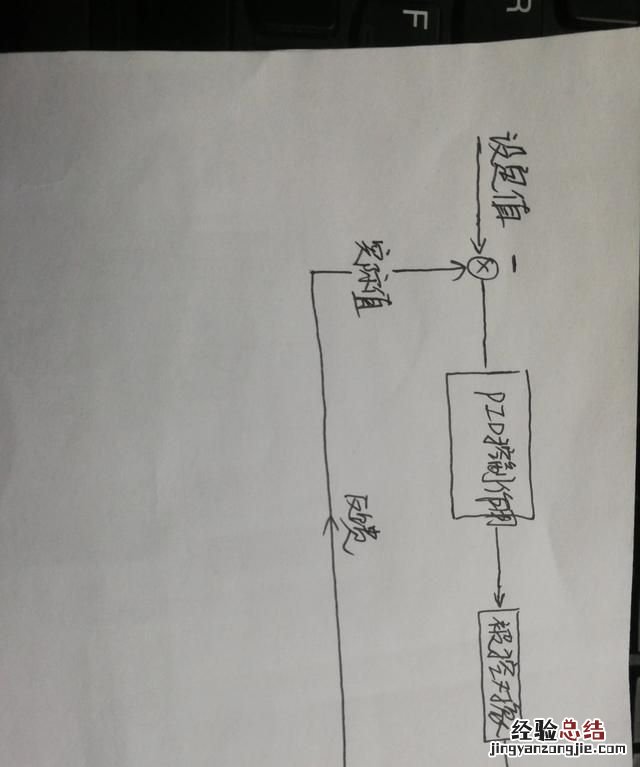
PID参数选定原则及模拟控制框图
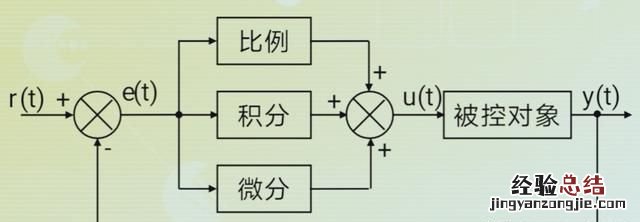
在自动调节系统中,比例、积分、微分组成PID控制器 。
仪表投自动需要耐心的看曲线、不断的进行修正,才能达到理想 。例如在在仪表方面的控制变量常见的有压力、液位、流量、温度 , 其中就设置的P、I、D的参数设置,才能达到一种动态平衡 。
在实际操作中,我们只先要设置一个经验值,后面修正就根据调节效果进行 。
压力系统;P(%)比例度在30-70 , I(s)积分时间0.4-3s 。
液位系统;P(%)比例度在20-80,I(s)积分时间1-5s 。
温度系统;P(%)比例度在20-60,I(s)积分时间3-10s,D(s)微分时间0.5-3s 。
流量系统;P(%)比例度在40-100,I(s)积分时间0.1-1s 。
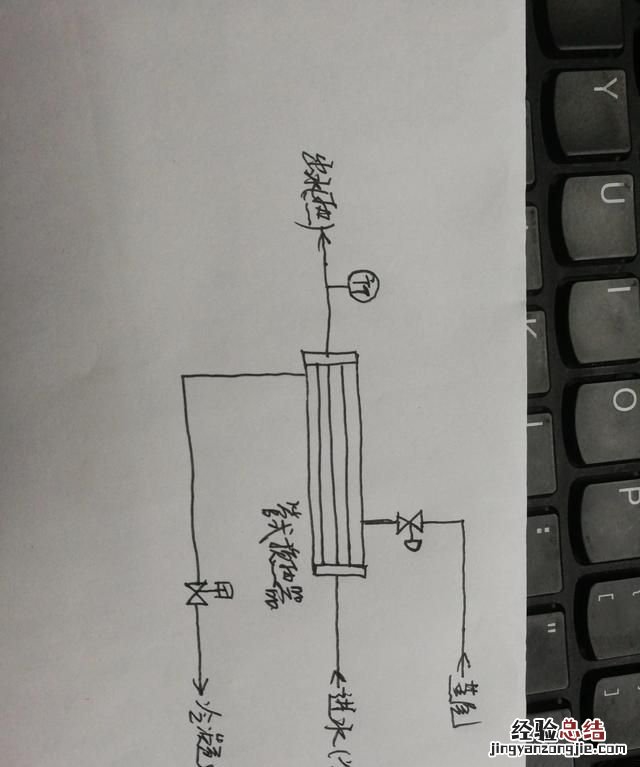
从上面的温度系统举例,从控制水温加热到100℃ 。分析问题;当水温加热到100℃停止加热,但是由于温度控制滞后性,虽然加热棒或加热管不在通电加热 , 经过一段时间温度还会持续上升 , 此时温度肯定会高于100℃,原因是因为加热器和水本身的传递温度有惰性导致的现象 。于是温度高于100℃,达不到我们控制要求 。那么在100℃之前停止加热,利用加热管的散热和水的惰性,过段时间温度肯定会达到100℃ 。这么想肯定是能解决问题,但是要在多少度停止加热刚刚好了呢?太早了停止加热怕水的惰性和加热器散热达不到100℃,太晚了怕加热温度高于100摄氏度 。利用我们人为解决既复杂又漫长,非常的困难 。于是科学家研究出了经典的PID控制技术,即PID闭环控制 。如何操作呢?在PID控制器中输入目标值100℃,然后再用温度传感器进行现场实时采样温度数据,把这个时实时的温度数据传递到PID控制器,温度传感器用热电偶、热电阻都可以使用 。
此时,PID控制器会接受到现场过来的实际水温,假如刚加热水温时温度为10℃,那么与目标值还差90℃,说明了需要加热的水温离我们目标水温还相差甚远 , 于是PID控制器的CUP会加足马力全力给加热器予以最高的工作电压,对水进行快速加热 。由于加热过程中,水温是不断的上升,此时接受到现场过来的温度数据也90℃,那么与目标值相差10℃ , 于是CPU就降低加热器的供电工作电压,若差5℃以内了 , CPU会发出给加热管的很低供电指令甚至断电指令 , 直到水温升到100℃ 。若超过100℃ , 则会一段时间停止给加热器提供工作电压,直到温度在100℃附近 , 在目标值附近时CPU就会频繁的对加热器进行控制,一直保持水温“平衡” 。实际上,水温不可能刚好与目标值重叠的,只可能在目标值附近震荡,但此振荡不会波动太大 , 满足实际需求的 , 从而实现了对控制目标的控制要求,使得温度控制系统变得更加科学可控 。
综上所述,只要PID参数整定合理 , PID控制过程中经过了比例积分微分的调整后,实际值只会越来越靠近目标值 , 但是不可能等于目标值 。因此 , 题目说的最终结果确实有相差,但是相差甚小 。其实PID闭环控制系统,最终只是一个动态平衡的系统而不是静态平衡系统 。用PID闭环控制,目的就是让被控对象快速稳定达到目标值 , 从而实现被控对象的可控性及可预知性,使得温度控制系统变得更加科学 。
针对你的问题,首先简单说明一下PID控制的基本原理 。PID控制是自动化控制工程中应用很广泛的调节控制规律,不同于开环控制,PID控制是闭环控制,它的基本控制结构见下图 。
P比例作用是用来消除设定值和反馈的实际值之间的偏差,消除误差后再由积分I作用来消除稳态误差 , 而对于存在滞后的系统 , 通过微分D作用来达到提前预判的作用 。
你所提到的PID输入进行变化,输出值和原来的相差了,我理解为PID输入设定值发生改变,PID输出值相应发生改变 。就此理解来谈一下你说的情况 。
就我所接触到的PID调节实际应用中,可以分为以下两种工况 。第一种工况:PID的输入设定值恒定不变,PID根据反馈回来的实际值和设定值之差进行作用,调节被控对象直到稳定 。第二种工况:例如加热升温的情况,要求目标温度不能太快也不能太慢,按照一定的速率上升,这时就可以对PID输入的目标值进行处理,让它按照一定的速率变化 。这种情况下,输入值发生变化,输出也会跟着变化 , 调节参数到合适值,系统还是很稳定的 。PID的作用就是要响应变化的,所以发生变化没关系 , 会自动调节到稳定状态的 。