引言各位大佬,晚上好啊,在上一篇博客中,我们讲了什么是UART串口通讯,以及使用USB转TTL使得单片机可以和c#上位机做一个串口通讯,接下来,为大家带来PWM的概念原理,以及实际案例,使用PWM对电机进行速度调制,因为本课程的最后是做一个红外遥控的智能小车,所以是需要电机四个,驱动四个,轮胎四个,所以PWM对于最后的成果也是极为重要,并且在实际开发中,PWM也是比较常用的调速方式 。
概念PWM全称Pulse width modulation,中文翻译为脉冲宽度调制,其基本原理为控制方式就是对逆变电路开关器件的通断进行控制,使输出端得到一系列幅值相等但宽度不一致的脉冲,用这些脉冲来代替正弦波或所需要的波形 。也就是在输出波形的半个周期中产生多个脉冲,使各脉冲的等值电压为正弦波形,所获得的输出平滑且低次谐波少 。按一定的规则对各脉冲的宽度进行调制,既可改变逆变电路输出电压的大小,也可改变输出频率 。
可能上面对于原理的解释过于官方,大家可能看不懂,通俗易懂的来说,就是通过对电子元器件的电路进行高低电平进行控制,在一段时间内,高低电平在输出会形成一段波动,这个波动可以成为PWM波形,而我们需要使用代码去控制PWM的输出波形,高电平在这一段波动中,通电时间即高电平时间是占了总时间多少,同时在这一段PWM波形中,高低电平来回切换的频率又是多少,形成了这么一段波形,这就引入了两个概念,占空比(Duty Ratio)和频率,占空比代表着,高电平通电总时和总时的一个占比(这段波形中,高低电平的总共占用时间),而频率则是高低电平在这段波形中,来回切换的一个频率 。
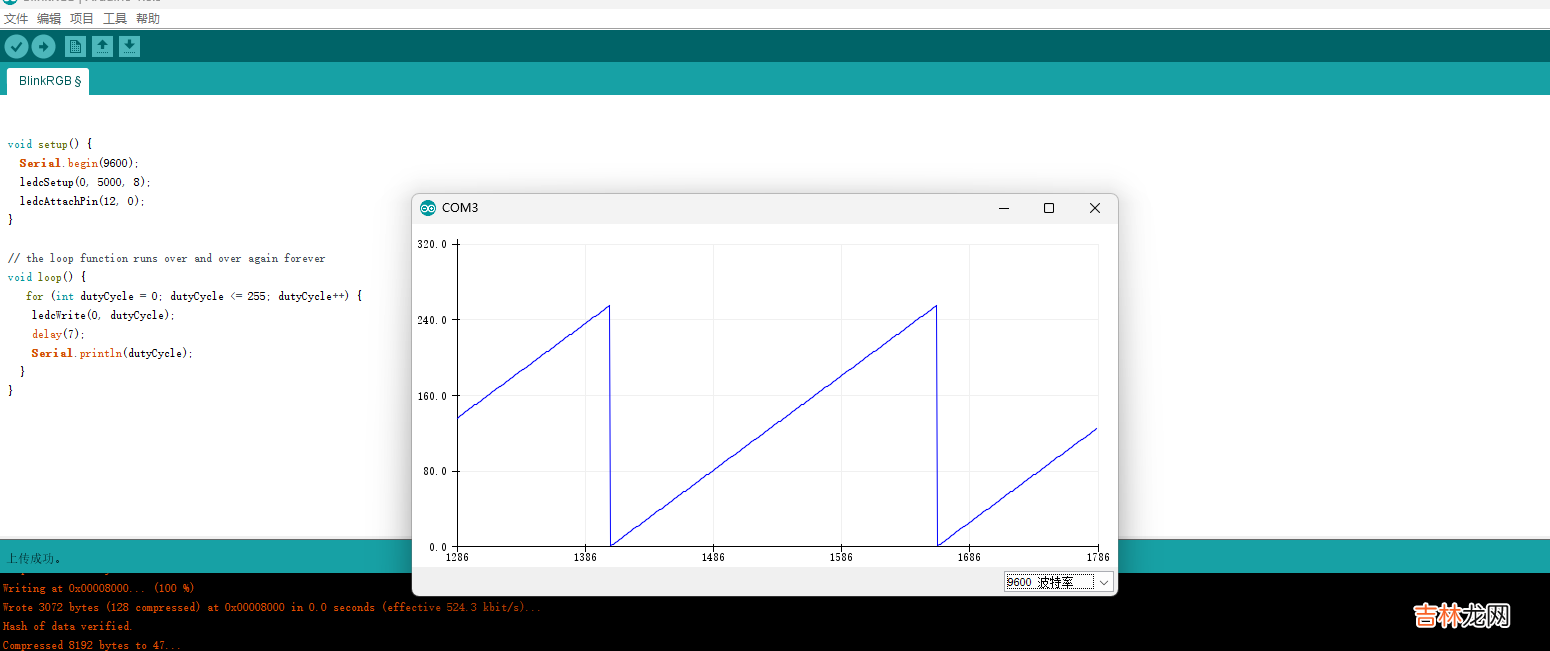
如下图,下方在Arduino串口绘图器中,展示了一段锯齿波形,看下方的GIF我们可以看到对应的电机运动也是有快到慢的一个运动状态 。
文章插图
代码解析
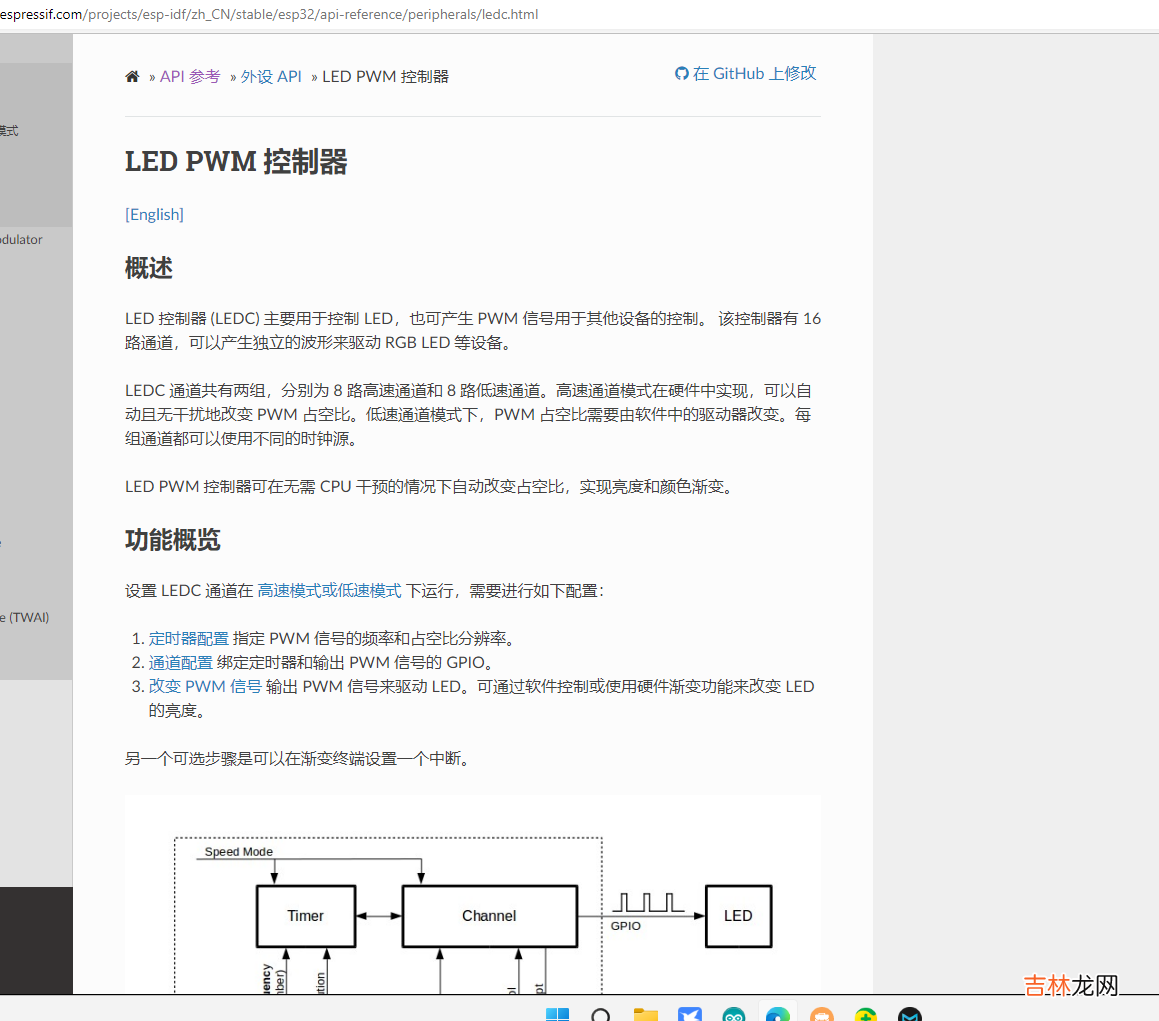
void setup() {Serial.begin(9600);ledcSetup(0, 5000, 8);ledcAttachPin(12, 0);}// the loop function runs over and over again forevervoid loop() {for (int dutyCycle = 0; dutyCycle <= 255; dutyCycle++) {ledcWrite(0, dutyCycle);delay(7);Serial.println(dutyCycle);}}在Arduino中我们可以使用LEDC来实现对PWM的控制,而在纯c乐鑫的开发板中,是可以使用MCPWM进行控制,但是由于Arduino在此处不能使用MCPWM,则就有了LEDC作为替代品,ESP32带有一个16通道的一个LED PWM控制器,对应使用的是乐鑫的LED PWM控制,ESP32 LED PWM,分为8路高速通道和8路低速通道,然后我们使用不同的频率,和占空比来实现控制电机转速的控制 。在上面的代码中,我们先设置了ledc的通道为0,频率为5000,第八个低速LED控制器,即代码为 ledcSetup(0, 5000, 8);然后需要将通道和引脚进行管理使用ledcAttachPin(12, 0);将引脚12和第0个通道关联起来,在loop代码中,可以看到,我们写入的最大的占空比为255,而0-255总数为256,那是因为,占空比是和通道是有关系的,上文提到,LED的PWM控制器一共有16个,此处我们使用8,而256则为2的8次方的值,所以占空比最大为256,如果取值为10,占空比的最大值则为1024-1;ledcwrite(0,dutyCycle);则是将占空比写入对应的通道,便完成了PWM对电机进行调速设置 。
文章插图
【四 【单片机入门】应用层软件开发的单片机学习之路-----ESP32开发板PWM控制电机以及中断的使用】Arduino针对ESP32 乐鑫PWM的封装,目前已知的有LEDC,不需要安装,默认就可以使用,而其他的也有对于PWM的封装,个人测试了一两个倒也没有这个好用,后续各位朋友也可以继续探索其他好用的PWM库进行开发 。










